TODO: explain CAN
type-c
type-c-pdf
cables
cables-pdf
C620-motor/esc
C620-esc-pdf
ref-system
ref-system-pdf
ref-system-protocols-pdf-v1.6
more-random-motors
robomasters-remote-pdf
bno055 datasheet
bno055 drivers
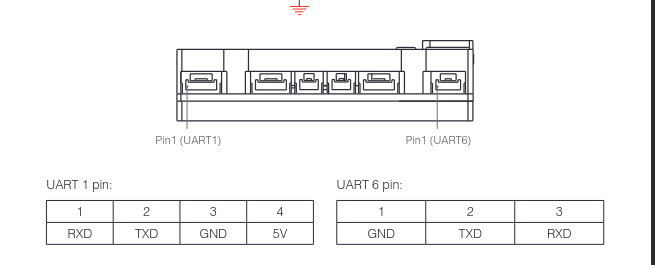
pinouts
rm reviver DR16
IMPORTANT
old repo
Taproot docs
navigate_before ROS2 cheat sheet
can id setups navigate_next