On this page
URDF
Setup
clone this repo into an existing workspace:
git clone https://github.com/joshnewans/my_bot.git
build with:
colcon build --symlink-install
test the launch file with:
ros2 launch my_bot rsp.launch.py
Note:
remember to runcolcon build --symlink-install
when adding any new files
Continue onto guide:
https://articulatedrobotics.xyz/tutorials/ready-for-ros/urdf
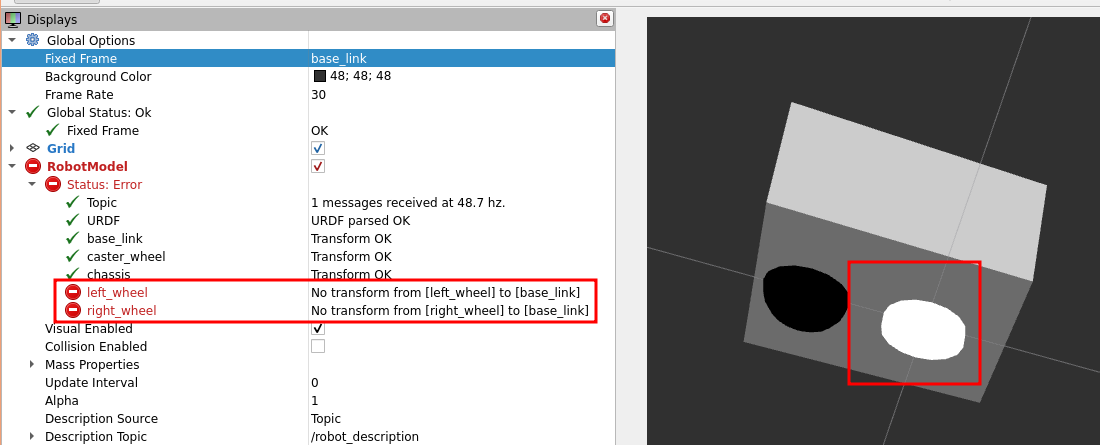
Note for debugging:
If in rviz you see there is an error in your RobotModel where you don’t see the wheels.
This is because the wheels are joints that need an input.
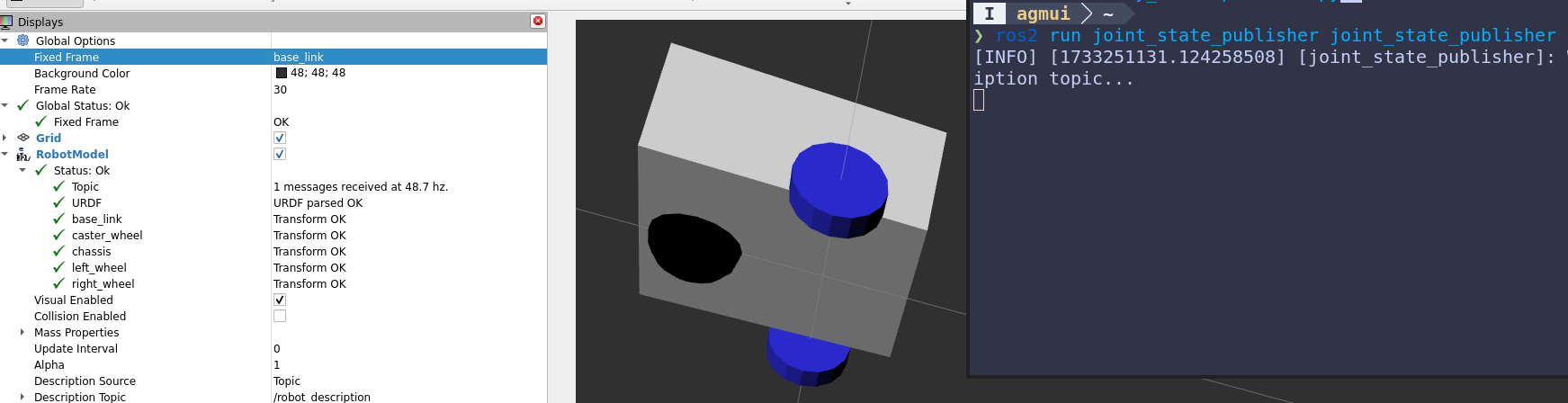
We have to call joint_state_publisher or joint_state_publisher_gui to give the wheels a value.
broken:
After running joint_state_publisher or joint_state_publisher_gui
The return of Exercises!!
make joint state publisher + joint state gui + rviz in to a launch file